フィルターを使用する理由
密集した都市部で ADS-B を介してフライトを追跡するには、独特の課題があります。それらの主要な問題は、干渉の問題です。多くの帯域外周波数がピックアップされるため、特定の周波数範囲を分離しようとすると問題が発生する可能性があります。 AirNav の最初のポータブル 1090MHz ADS-B フィルターは、干渉を大幅に低減し、1090 MHz ADS-B 受信を最適化すると同時に、追跡範囲を拡大することで、この問題を解決するように設計されています。


特徴
ここにリストされているのは、RadarBox ADS-B フィルターを優れた選択肢にする機能の一部です。
- 1090 MHz ADS-B 受信を最適化します (モード S フィルター)。
- SMA メスから SMA オス。
- ノイズ/干渉を大幅に低減します。
- 信号対雑音比 (SNR) の向上。
- 受信機の追跡範囲が大幅に拡大。
- Mode-S メッセージの受信数が増加しました。
- SMA コネクタを備えたすべての ADS-B レシーバーで動作します。
- ポータブル、コンパクト、軽量。
セットアップ
以下のブロック図に従って、Radarbox 1090 ADS-B フィルターを既存の ADS-B セットアップに正しく接続します。
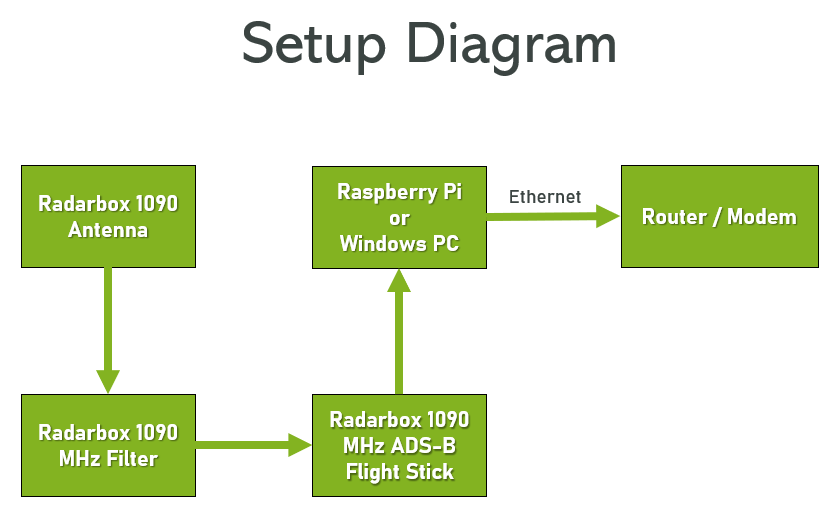
手順
- フィルタの SMA オス コネクタをアンテナのメス コネクタに接続します。
- フィルターの SMA メス コネクタをフライト スティックのオス コネクタに接続します。
- Flight Stick を Raspberry Pi / PC の USB ポートに差し込みます。
- Raspberry Pi / PC からルーターまたはモデムにイーサネット線を接続します。
- ラズベリーパイの電源を入れます。
- Radarbox.com の My Station ページにアクセスして、改善された範囲を確認してください。
もっと助けが必要ですか?
フィルタの設定で問題が発生した場合は、 Radarbox サポートにお問い合わせください。